图文解析磁力搅拌器研制过程
文章主要对一种建立在 89C51 单片机设计的基础上来利用数字信号驱动的磁力搅拌器进行介绍,智能数字化磁力搅拌器最突出的优势是其低速搅拌性能和稳速性能特点,这改善了高精度恒温系统的稳定性。智能数字化磁力搅拌器在溶液化学实验装置中的应用效果非常不错。
磁力搅拌器是科研和生产中的常用溶液系部件, 当前普遍采用的传统磁力搅拌器基本是采用交流串励电机, 通过调节交流电压实现转速调节;由于交流串励电机的转速随转矩及电源电压变化很大, 在实验进程或外部因素对实验体系的溶液粘滞系数等物理性质产生影响时, 出现很大的转速误差, 甚至停转现象;另外,因传统的磁力搅拌器不具有智能化, 不能及时对异常情况进行处理, 对科研和生产造成了较大的危害。应科研工作需要, 我们研制开发出采用89C51 单片机产生数字化的控制信号, 驱动步进电机, 再由步进电机带动新型强力钕铁硼磁铁组成的磁力搅拌部分。从根本上解决了传统的磁力搅拌器转速误差大、转矩小和低速性能差的缺陷, 使用效果良好。

基本原理
本机主要分为硬件和软件两部分。硬件是系统运行的基础。本设计采用ATMEL公司的89C2051单片机为核心,以步进电机为换能元件,为系统的运转精度和智能化提供了保证。软件是系统运行的灵魂。软件采用即时读取用户设定参数,修正步进电机的驱动信号的方法,并通过霍尔传感器,监控步进电机的转动状态,对异常情况监控,及时进行修正和处理,达到了精确、及时、长期稳定的搅拌速率控制的目标。
硬件电路简介
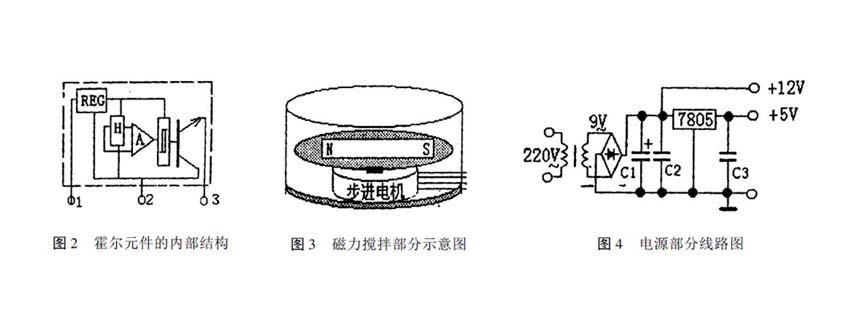
本机的硬件电路由控制部分、隔离放大部分、执行部分、反馈检测部分和电源部分等单元组成。硬件电路结构如图1所示。基本工作过程如下:89C2051单片机从P1口读取两只十进制编码开关的设定值,根据设定值产生2路定宽调频时序脉冲控制信号,2路时序脉冲控制信号经P3.4口和P3.5口分别送至光电耦合器IC3和IC4隔离,再经功率驱动电路放大驱动步进电机;步进电机的旋转动作由霍尔传感器IC2检测,反馈回单片机P3.4口,以判断步进电机的运转状态;若步进电机运转失常,则从P3.0口驱动蜂鸣器(FM)发出5分钟的间断报警信号,同时P3.1口发出故障指示信号。霍尔元件的内部结构如图2所示。磁力搅拌部分示意图如图3所示。条形磁铁采用新型钕铁硼强力磁铁。电源部分如图4所示。
软件简介
本机软件采用查询方式工作。通过即时读取拨盘开关的8位数据,以定宽调频的方式,通过修改步进电机的占空比,来调整步进电机的转速,并在每步步进信号发出后,通过检测霍尔元件的反馈信号达到监控步进电机的转动状态
的目的。软件流程如图5所示。
使用方法
使用本机时,应将主机部分置于干燥通风处,搅拌部分的环境温度不应高于150℃;高速搅拌时应采用磁性较强的磁子,以保证搅拌所需的转矩。另外,主机在高精度系统使用时,应正确选择搅拌转速,以减小由于搅拌能量功热转换引起的系统温度误差。
讨论
由于本机是应科研课题专门开发设计的部件,因此存在一定的局限性。但其转速精度高、转矩大、低速性能好的特点是传统磁力搅拌器无以伦比的。在今后的工作中,我们将进一步发挥单片机的优势,开发出可程控化的实现多时段、多转速,且具有转速显示及可以驱动多个搅拌部分的低成本、多功能的新型磁力搅拌器。



 处理中......
处理中......